O laboratorium
Laboratorium modelowania i symulacji procesów logistycznych i transportowych funkcjonuje w ramach Katedry Eksploatacji Systemów Technicznych na Wydziale Mechanicznym Politechniki Wrocławskiej.
Do zakresu działalności laboratorium należą:
– wykonywanie zleceń z przemysłu z obszaru e-commerce, produkcji, transportu wewnętrznego, gospodarki odpadami,
– realizacja projektów badawczych,
– prowadzenie zajęć dla studentów kierunków Zarządzanie i Inżynieria Produkcji oraz Transport.
Głównym zasobem laboratorium jest oprogramowanie Flexsim. Dodatkowe możliwości zapewniają posiadane systemy wirtualnej rzeczywistości integrowalne z wykorzystywanym oprogramowaniem.
Opracowane modele
MODEL SORTOWNI ODPADÓW KOMUNALNYCH
– opracowanie modeli 3D elementów systemu (wizualizacja o wysokiej zgodności z systemem rzeczywistym)
– analiza i ocena procesów sortowania
– symulacyjne badanie zmiany struktury systemu (wprowadzenie dodatkowego elementu)
MODEL SYSTEMU PRODUKCJI BATERII LITOWO-JONOWYCH
– opracowanie modeli 3D elementów systemu (wizualizacja o wysokiej zgodności z systemem rzeczywistym)
– analiza i propozycja poprawy procesów produkcji baterii
– symulacyjne badanie możliwości osiągnięcia założonej wydajności systemu
MODEL PROCESÓW KOMPLETACJI I PAKOWANIA DLA PRZEDSIĘBIORSTWA Z BRANŻY E-COMMERCE
– odwzorowanie systemu w stanie obecnym oraz po wprowadzeniu planowanych przez firmę zmian (rozbudowa linii pakowania)
– analiza wydajności systemu oraz wykorzystania stacji roboczych
MODEL MAGAZYNU DLA PRZEDSIĘBIORSTWA Z BRANŻY OBUWNICZEJ
– weryfikacja projektu transportu wewnętrznego opartego na przenośnikach
– symulacyjne badanie wydajności opracowanego rozwiązania
Projekty badawcze
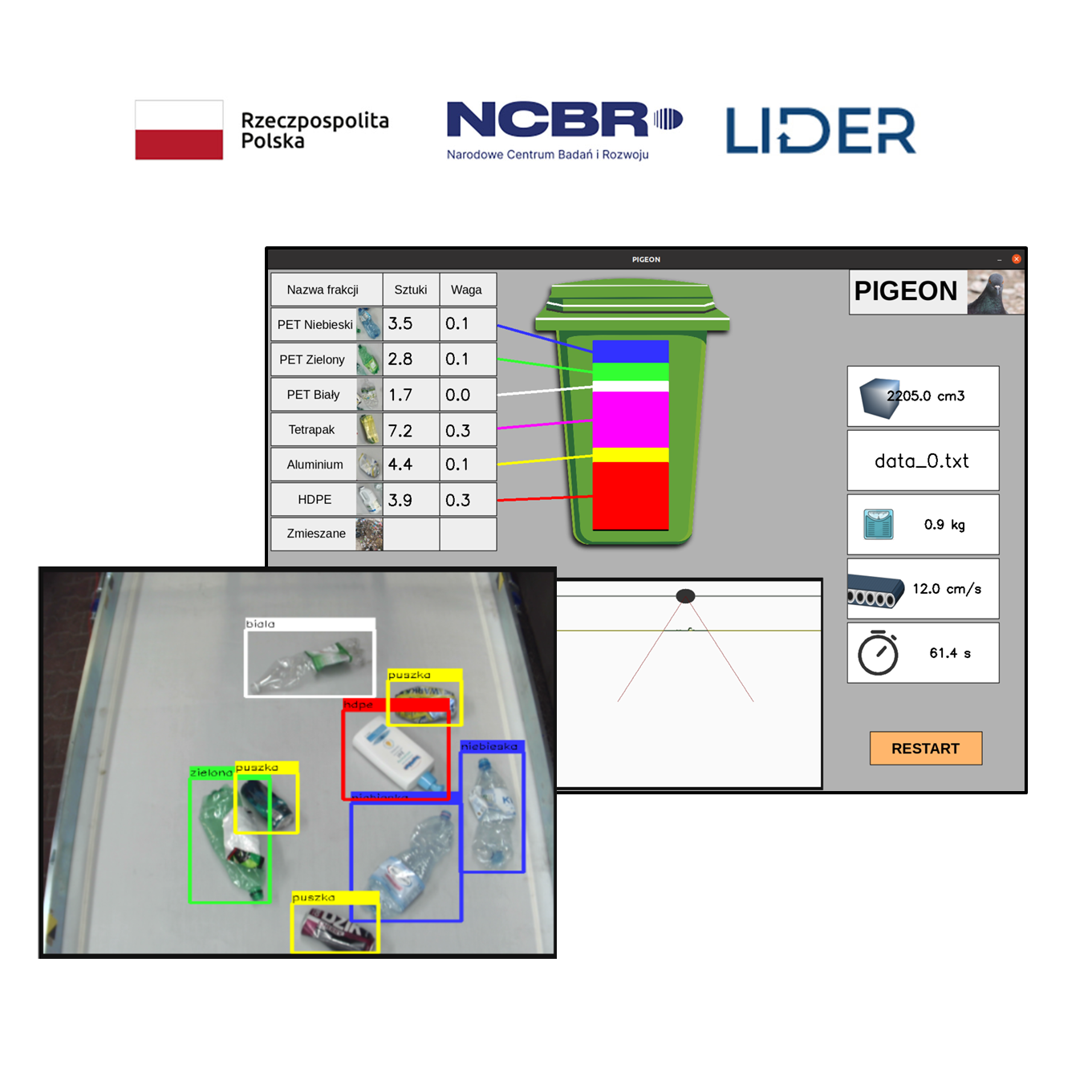
Cyber-fizyczny system sterowania strumieniem odpadów (CyPhisCTRL)
Celem projektu jest opracowanie cyber-fizycznego systemu sterowania systemem sortowania odpadów – „cyfrowego bliźniaka” sortowni odpadów. Prace badawcze obejmują opracowanie minatury systemu sortowania w przyjętej skali (reprezentację systemu rzeczywistego) oraz budowę modelu symulacyjnego (wirtualnej kopii systemu) połączonych dwukierunkowym przepływem danych. Opracowany system umożliwi podejmowanie decyzji odnośnie sterowania systemem ukierunkowanym na maksymalizację wskaźników operacyjnych i niezawodnościowych systemu. Wyniki projektu mogą wpłynąć na redukcję ilości składowanych odpadów i istotnie zwiększyć uzyskiwane poziomy odzysku.
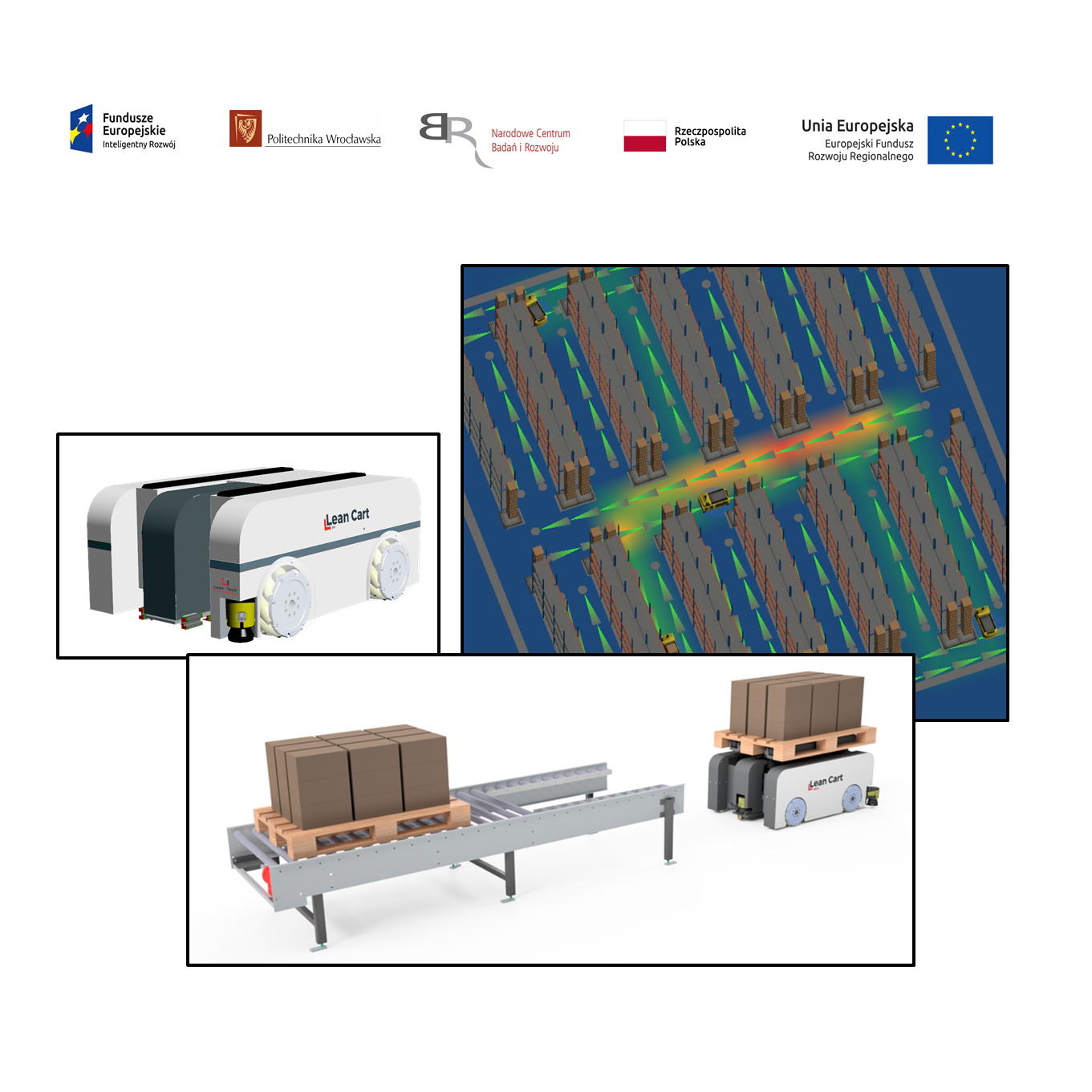
Zrobotyzowany system inteligentnego transportu wewnętrznego (INTRO)
Celem projektu było opracowanie i zweryfikowanie w trakcie prac badawczo – rozwojowych koncepcji inteligentnego systemu magazynowego obsługiwanego przez autonomiczne roboty transportujące mogące podejmować paletowe jednostki ładunkowe bezpośrednio z podłoża za pomocą wysuwanych wideł. Opracowane rozwiązanie wpisujące się w założenia Przemysłu 4.0, stanowi uzupełnienie częściowo zautomatyzowanych systemów magazynowych wykorzystywanych w branży e-commerce. Modelowanie symulacyjne wykorzystano do weryfikacji założeń zarządzania systemem oraz do opracowania konfiguratora wspierającego proces projektowania systemu magazynowego.
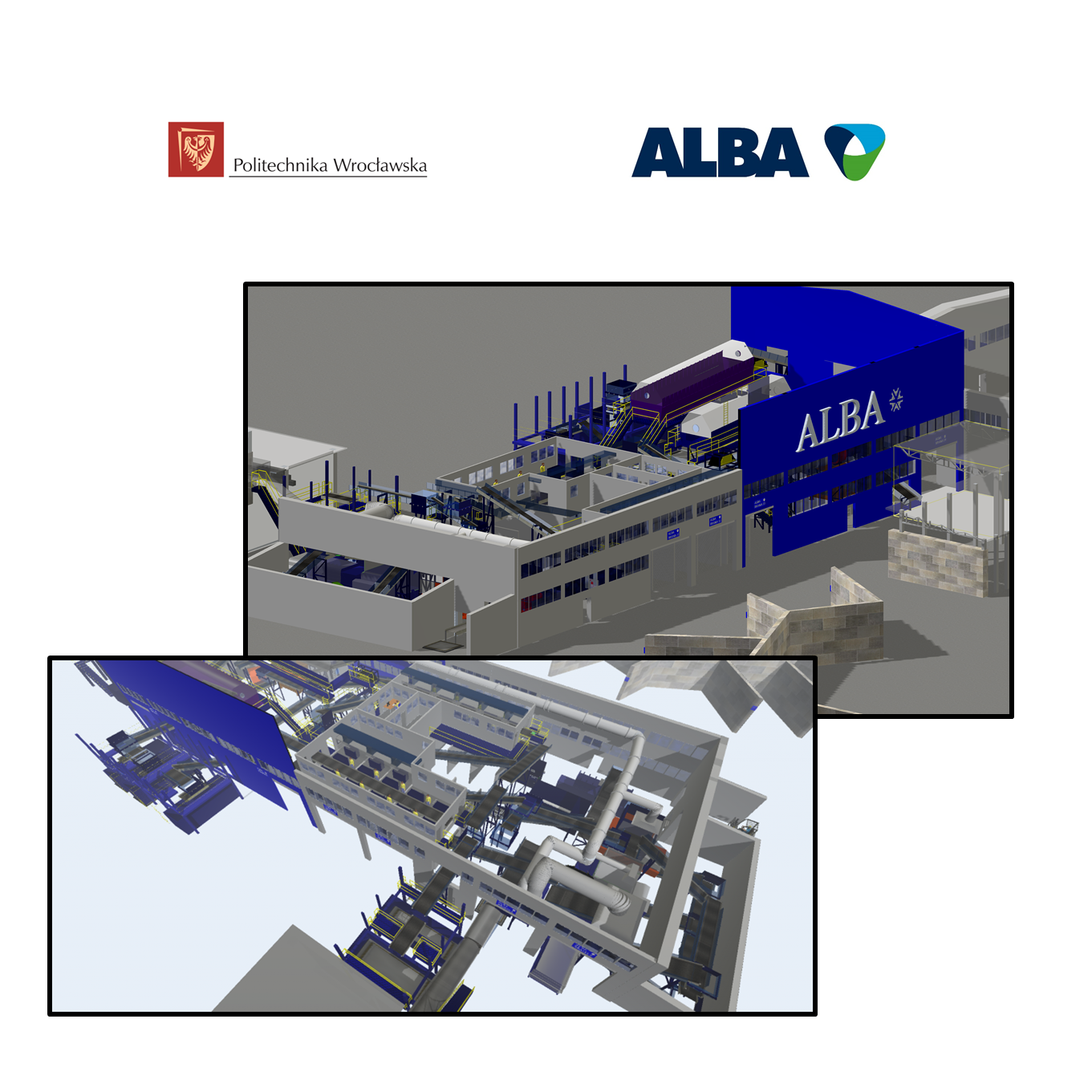
Model systemu wsparcia logistycznego procesu zagospodarowania odpadów komunalnych w przedsiębiorstwie WPO ALBA S.A.
Celem projektu było opracowanie modelu symulacyjnego systemu logistycznego wspierającego proces zagospodarowania odpadów komunalnych przez przedsiębiorstwo WPO ALBA S.A. Opracowany model pozwolił na usprawnienie procesów będących elementami systemu gospodarki odpadami komunalnymi (zbiórka, transport do miejsca przeładunku, przeładunek, magazynowanie, sortowanie oraz transport zmieszanych odpadów do RIPOK). Opracowany model umożliwił planowanie rejonów i tras zbiórki odpadów, dostosowanie częstotliwości odbioru odpadów do rzeczywistych potrzeb występujących w poszczególnych obszarach miasta oraz udoskonalenie procesów przetwarzania odebranych odpadów.
Metoda zarządzania procesem sortowania odpadów z wykorzystaniem koncepcji Cyfrowego Bliźniaka
Celem projektu było opracowanie metody zarządzania ręcznym sortowaniem odpadów umożliwiającą bieżącą analizę danych oraz optymalizację procesu w czasie rzeczywistym. Przyjęto metodologię badawczą opartą o koncepcję cyfrowego bliźniaka człowieka (sortowacza odpadów). W badaniach wykorzystano technikę motion capture poprzez wykorzystanie rękawic haptycznych do zbierania danych nt. efektywności sortowania ręcznego. W dalszym etapie prac, rękawice zintegrowano z modelem symulacyjnym celem optymalizacji procesu.

Zespół

Dr inż. Robert Giel
Adiunkt Badawczo-Dydaktyczny
